Technical Writings
- C++ Concurrency Book
- Articles and Publications
- Conference Presentations
- Recent Blog Entries
- Multithreading Blog Entries
- C++ Blog Entries
Subscribe to Blog
Blog Archives
All the world's a stage... C++ Actors from Just::Thread Pro
Wednesday, 15 July 2015
Handling shared mutable state is probably the single hardest part of writing multithreaded code. There are lots of ways to address this problem; one of the common ones is the actors metaphor. Going back to Hoare's Communicating Sequential Processes, the idea is simple - you build your program out of a set of actors that send each other messages. Each actor runs normal sequential code, occasionally pausing to receive incoming messages from other actors. This means that you can analyse the behaviour of each actor independently; you only need to consider which messages might be received at each receive point. You could treat each actor as a state machine, with the messages triggering state transitions.
This is how Erlang processes work: each process is an actor, which runs independently from the other processes, except that they can send messages to each other. Just::thread Pro: Actors Edition adds library facilities to support this to C++. In the rest of this article I will describe how to write programs that take advantage of it. Though the details will differ, the approach can be used with other libraries that provide similar facilities, or with the actor support in other languages.
Simple Actors
Actors are embodied in the
jss::actor
class. You pass in a function or other callable object (such as a lambda
function) to the constructor, and this function is then run on a background
thread. This is exactly the same as for
std::thread,
except that the destructor waits for the actor thread to finish, rather than
calling std::terminate.
void simple_function(){
std::cout<<"simple actor\n";
}
int main(){
jss::actor actor1(simple_function);
jss::actor actor2([]{
std::cout<<"lambda actor\n";
});
}The waiting destructor is nice, but it's really a side issue — the main benefit of actors is the ability to communicate using messages rather than shared state.
Sending and receiving messages
To send a message to an actor you just call the
send()
member function on the actor object, passing in whatever message you wish to
send. send() is a function template, so you can send any type of message
— there are no special requirements on the message type, just that it is a
MoveConstructible type. You can also use the stream-insertion operator to send
a message, which allows easy chaining e.g.
actor1.send(42);
actor2.send(MyMessage("some data"));
actor2<<Message1()<<Message2();Sending a message to an actor just adds it to the actor's message queue. If the
actor never checks the message queue then the message does nothing. To check the
message queue, the actor function needs to call the
receive()
static member function of
jss::actor. This
is a static member function so that it always has access to the running actor,
anywhere in the code — if it were a non-static member function then you
would need to ensure that the appropriate object was passed around, which would
complicate interfaces, and open up the possibility of the wrong object being
passed around, and lifetime management issues.
The call to jss::actor::receive() will then block the actor's thread until a
message that it can handle has been received. By default, the only message type
that can be handled is jss::stop_actor. If a message of this type is sent to
an actor then the receive() function will throw a jss::stop_actor
exception. Uncaught, this exception will stop the actor running. In the
following example, the only output will be "Actor running", since the actor will
block at the receive() call until the stop message is sent, and when the message
arrives, receive() will throw.
void stoppable_actor(){
std::cout<<"Actor running"<<std::endl;
jss::actor::receive();
std::cout<<"This line is never run"<<std::endl;
}
int main(){
jss::actor a1(stoppable_actor);
std::this_thread::sleep_for(std::chrono::seconds(1));
a1.send(jss::stop_actor());
}Sending a "stop" message is common-enough that there's a special member function
for that too:
stop(). "a1.stop()"
is thus equivalent to "a1.send(jss::stop_actor())".
Handling a message of another type requires that you tell the receive() call
what types of message you can handle, which is done by chaining one or more
calls to the
match()
function template. You must specify the type of the message to handle, and then
provide a function to call if the message is received. Any messages other than
jss::stop_actor not specified in a match() call will be removed from the queue,
but otherwise ignored. In the following example, only messages of type "int" and
"std::string" are accepted; the output is thus:
Waiting
42
Waiting
Hello
Waiting
DoneHere's the code:
void simple_receiver(){
while(true){
std::cout<<"Waiting"<<std::endl;
jss::actor::receive()
.match<int>([](int i){std::cout<<i<<std::endl;})
.match<std::string>([](std::string const&s){std::cout<<s<<std::endl;});
}
}
int main(){
{
jss::actor a(simple_receiver);
a.send(true);
a.send(42);
a.send(std::string("Hello"));
a.send(3.141);
a.send(jss::stop_actor());
} // wait for actor to finish
std::cout<<"Done"<<std::endl;
}It is important to note that the receive() call will block until it receives
one of the messages you have told it to handle, or a jss::stop_actor message,
and unexpected messages will be removed from the queue and discarded. This means
the actors don't accumulate a backlog of messages they haven't yet said they can
handle, and you don't have to worry about out-of-order messages messing up a
receive() call.
These simple examples have just had main() sending messages to the actors. For
a true actor-based system we need them to be able to send messages to each
other, and reply to messages. Let's take a look at how we can do that.
Referencing one actor from another
Suppose we want to write a simple time service actor, that sends the current
time back to any other actor that asks it for the time. At first thought it
looks rather simple: write a simple loop that handles a "time request" message,
gets the time, and sends a response. It won't be that much different from our
simple_receiver() function above:
struct time_request{};
void time_server(){
while(true){
jss::actor::receive()
.match<time_request>([](time_request r){
auto now=std::chrono::system_clock::now();
????.send(now);
});
}
}The problem is, we don't know which actor to send the response to — the
whole point of this time server is that it will respond to a message from any
other actor. The solution is to pass the sender as part of the message. We could
just pass a pointer or reference to the jss::actor instance, but that requires
that the actor knows the location of its own controlling object, which makes it
more complicated — none of the examples we've had so far could know that,
since the controlling object is a local variable declared in a separate
function. What is needed instead is a simple means of identifying an actor,
which the actor code can query — an actor reference. The type of an actor
reference is
jss::actor_ref,
which is implicitly constructible from a jss::actor. An actor can also obtain
a reference to itself by calling
jss::actor::self(). jss::actor_ref
has a
send()
member function and stream insertion operator for sending messages, just like
jss::actor. So, we can put the sender of our time_request message in the message
itself as a jss::actor_ref data member, and use that when sending the response.
struct time_request{
jss::actor_ref sender;
};
void time_server(){
while(true){
jss::actor::receive()
.match<time_request>([](time_request r){
auto now=std::chrono::system_clock::now();
r.sender<<now;
});
}
}
void query(jss::actor_ref server){
server<<time_request{jss::actor::self()};
jss::actor::receive()
.match<std::chrono::system_clock::time_point>(
[](std::chrono::system_clock::time_point){
std::cout<<"time received"<<std::endl;
});
}Dangling references
If you use jss::actor_ref then you have to be prepared for the case that the
referenced actor might have stopped executing by the time you send the
message. In this case, any attempts to send a message through the
jss::actor_ref instance will throw an exception of type
[jss::no_actor]http://www.stdthread.co.uk/prodoc/headers/actor/no_actor.html. To
be robust, our time server really ought to handle that too — if an
unhandled exception of any type other than jss::stop_actor escapes the actor
function then the library will call std::terminate. We should therefore wrap the
attempt to send the message in a try-catch block.
void time_server(){
while(true){
jss::actor::receive()
.match<time_request>([](time_request r){
auto now=std::chrono::system_clock::now();
try{
r.sender<<now;
} catch(jss::no_actor&){}
});
}
}We can now set up a pair of actors that play ping-pong:
struct pingpong{
jss::actor_ref sender;
};
void pingpong_player(std::string message){
while(true){
try{
jss::actor::receive()
.match<pingpong>([&](pingpong msg){
std::cout<<message<<std::endl;
std::this_thread::sleep_for(std::chrono::milliseconds(50));
msg.sender<<pingpong{jss::actor::self()};
});
}
catch(jss::no_actor&){
std::cout<<"Partner quit"<<std::endl;
break;
}
}
}
int main(){
jss::actor ping(pingpong_player,"ping");
jss::actor pong(pingpong_player,"pong");
ping<<pingpong{pong};
std::this_thread::sleep_for(std::chrono::seconds(1));
ping.stop();
pong.stop();
}This will give output along the lines of the following:
ping
pong
ping
pong
ping
pong
ping
pong
ping
pong
ping
pong
ping
pong
ping
pong
ping
pong
ping
pong
Partner quitThe sleep in the player's message handler is to slow everything down — if
you take it out then messages will go back and forth as fast as the system can
handle, and you'll get thousands of lines of output. However, even at full speed
the pings and pongs will be interleaved, because sending a message synchronizes
with the receive() call that receives it.
That's essentially all there is to it — the rest is just application design. As an example of how it can all be put together, let's look at an implementation of the classic sleeping barber problem.
The Lazy Barber
For those that haven't met it before, the problem goes like this: Mr Todd runs a barber shop, but he's very lazy. If there are no customers in the shop then he likes to go to sleep. When a customer comes in they have to wake him up if he's asleep, take a seat if there is one, or come back later if there are no free seats. When Mr Todd has cut someone's hair, he must move on to the next customer if there is one, otherwise he can go back to sleep.
The barber actor
Let's start with the barber. He sleeps in his chair until a customer comes in, then wakes up and cuts the customer's hair. When he's done, if there is a waiting customer he cuts that customer's hair. If there are no customers, he goes back to sleep, and finally at closing time he goes home. This is shown as a state machine in figure 1.
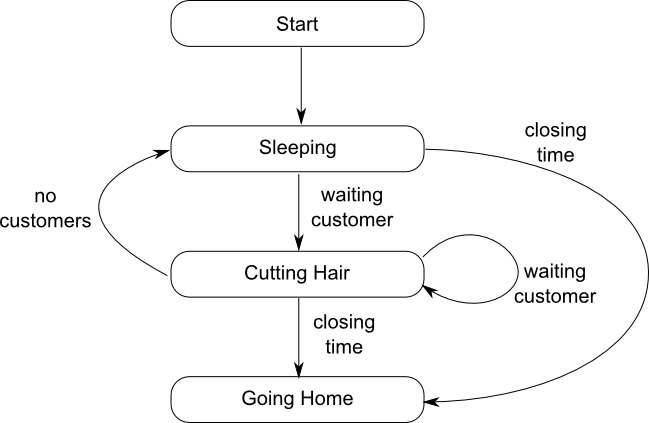
This translates into code as shown in listing 1.The wait
loops for "sleeping" and "cutting hair" have been combined, since almost the
same set of messages is being handled in each case — the only difference
is that the "cutting hair" state also has the option of "no customers", which
cannot be received in the "sleeping" state, and would be a no-op if it was. This
allows the action associated with the "cutting hair" state to be entirely
handled in the lambda associated with the customer_waiting message; splitting
the wait loops would require that the code was extracted out to a separate
function, which would make it harder to keep count of the haircuts. Of course,
if you don't have a compiler with lambda support then you'll need to do that
anyway. The logger is a global actor that receives std::strings as messages
and writes them to std::cout. This avoids any synchronization issues with
multiple threads trying to write out at once, but it does mean that you have to
pre-format the strings, such as when logging the number of haircuts done in the
day. The code for this is shown in listing 2.
The customer actor
Let's look at things from the other side: the customer. The customer goes to town, and does some shopping. Each customer periodically goes into the barber shop to try and get a hair cut. If they manage, or the shop is closed, then they go home, otherwise they do some more shopping and go back to the barber shop later. This is shown in the state machine in figure 2.
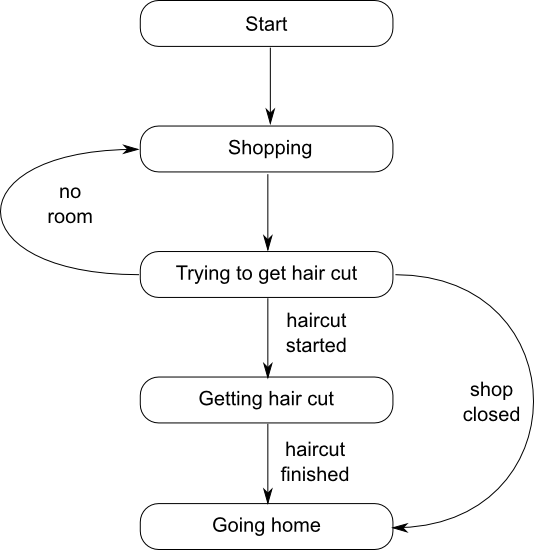
This translates into the code in listing 3. Note that the customer
interacts with a "shop" actor that I haven't mentioned yet. It is often
convenient to have an actor that represents shared state, since this allows
access to the shared state from other actors to be serialized without needing an
explicit mutex. In this case, the shop holds the number of waiting customers,
which must be shared with any customers that come in, so they know whether there
is a free chair or not. Rather than have the barber have to deal with messages
from new customers while he is cutting hair, the shop acts as an
intermediary. The customer also has to handle the case that the shop has already
closed, so the shop reference might refer to an actor that has finished
executing, and thus get a jss::no_actor exception when trying to send
messages.
The message handlers for the shop are short, and just send out further messages to the barber or the customer, which is ideal for a simple state-manager — you don't want other actors waiting to perform simple state checks because the state manager is performing a lengthy operation; this is why we separated the shop from the barber. The shop has 2 states: open, where new customers are accepted provided there are fewer than the remaining spaces, and closed, where new customers are turned away, and the shop is just waiting for the last customer to leave. If a customer comes in, and there is a free chair then a message is sent to the barber that there is a customer waiting; if there is no space then a message is sent back to the customer to say so. When it's closing time then we switch to the "closing" state — in the code we exit the first while loop and enter the second. This is all shown in listing 4.
The messages are shown in listing 5, and the main() function that drives it all is in listing 6.
Exit stage left
There are of course other ways of writing code to deal with any particular scenario, even if you stick to using actors. This article has shown some of the issues that you need to think about when using an actor-based approach, as well as demonstrating how it all fits together with the Just::Thread Pro actors library. Though the details will be different, the larger issues will be common to any implementation of the actor model.
Get the code
If you want to download the code for a better look, or to try it out, you can download it here.
Get your copy of Just:::Thread Pro
If you like the idea of working with actors in your code, now is the ideal time to get Just::Thread Pro. Get your copy now.
This blog post is based on an article that was printed in the July 2013 issue of CVu, the Journal of the ACCU.
Posted by Anthony Williams
[/ threading /] permanent link
Tags: cplusplus, actors, concurrency, multithreading
Stumble It! ![]() | Submit to Reddit
| Submit to Reddit ![]() | Submit to DZone
| Submit to DZone ![]()
If you liked this post, why not subscribe to the RSS feed ![]() or Follow me on Twitter? You can also subscribe to this blog by email using the form on the left.
or Follow me on Twitter? You can also subscribe to this blog by email using the form on the left.
Design and Content Copyright © 2005-2026 Just Software Solutions Ltd. All rights reserved. | Privacy Policy
2 Comments
Hello. What do you think SObjectizer Agent library ?
Slides http://eao197.blogspot.co.il/2015/05/prog-all-slides-related-to-sobjectizer.html Documentation http://sourceforge.net/p/sobjectizer/wiki/Basics/Microsoft has its Asynchronous Agents Library, and you have this library. It would be nice to get something like it into standard C++. Do you know if there is any chance of that happening?